
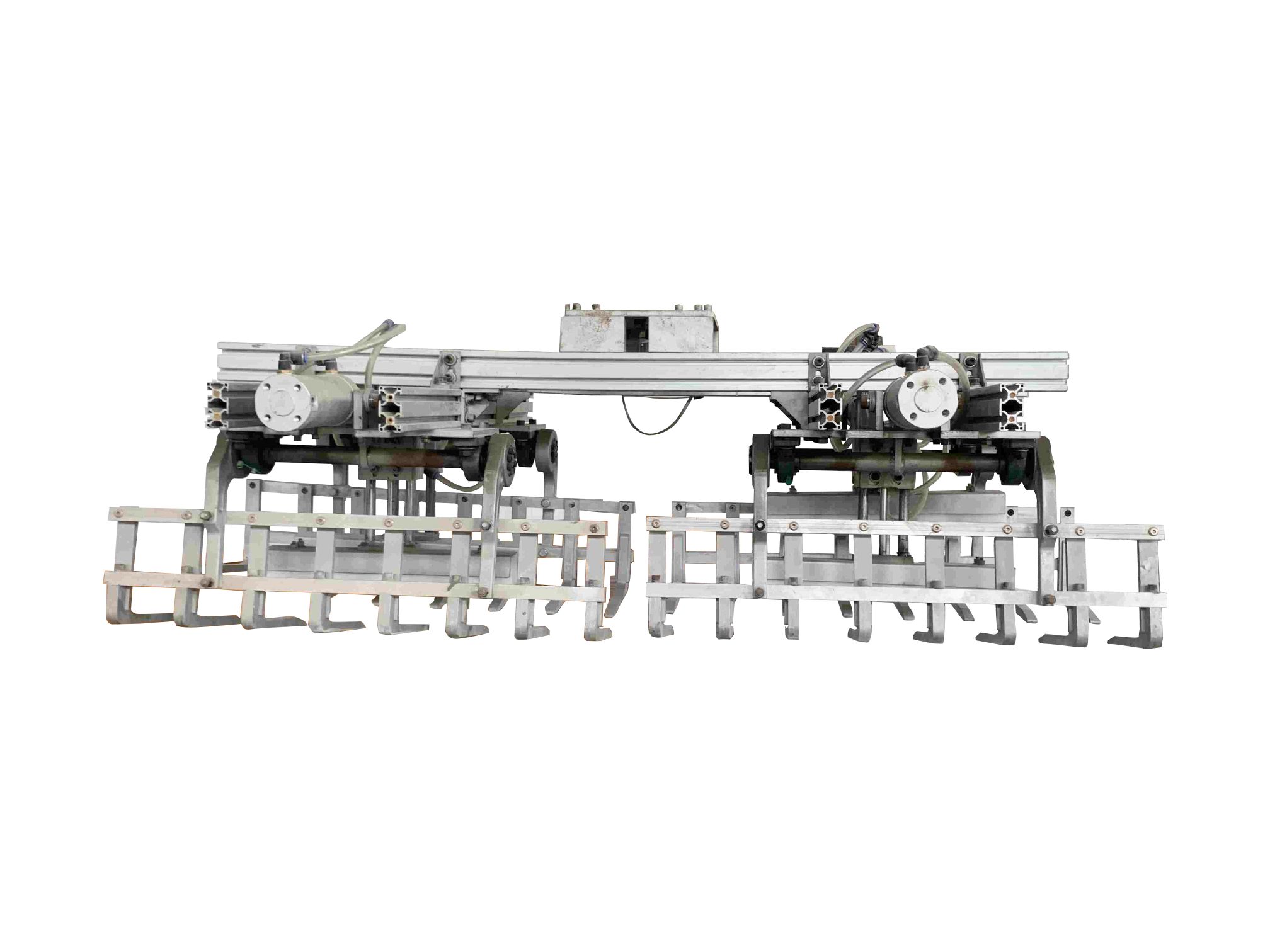




Gripper de garra dupla de robô paletizador
1. O design da garra dupla permite que o robô pegue dois itens ao mesmo tempo ou pegue itens de posições diferentes, reduzindo efetivamente o número de garras e diminuindo assim o tempo de paletização.
2. Geralmente equipado com um sistema de acionamento mais poderoso e design estrutural, as duas garras trabalham juntas para dispersar a carga e podem suportar maior peso.
3. As duas garras podem se mover de forma independente ou em coordenação e podem ajustar flexivelmente o método de captura de acordo com a forma e o tamanho das mercadorias.
4. As garras duplas podem ser ajustadas para obter posicionamento e posicionamento mais precisos ao colocar mercadorias em paletes ou locais designados.
5. As garras duplas são distribuídas ou projetadas simetricamente de acordo com os princípios da mecânica, que podem manter melhor o equilíbrio ao capturar mercadorias. As garras duplas podem compensar a força desequilibrada das mercadorias ajustando a força e a posição.
Consiste em duas garras independentes que podem funcionar juntas. As garras geralmente são feitas de liga de alumínio de alta resistência ou aço inoxidável. Eles têm as características de peso leve, alta resistência e resistência à corrosão e podem se adaptar a vários ambientes de trabalho severos.
 Está conectado ao final do braço robótico do robô de paletização através de juntas de alta precisão, rolamentos e dispositivos de transmissão para garantir a estabilidade e a precisão das garras duplas durante o movimento.
Está conectado ao final do braço robótico do robô de paletização através de juntas de alta precisão, rolamentos e dispositivos de transmissão para garantir a estabilidade e a precisão das garras duplas durante o movimento.
 O sensor de pressão é usado para monitorar a força segura das garras em tempo real, para impedir que as mercadorias sejam danificadas por força excessiva ou cair devido à força segura insuficiente; O sensor de posição pode fazer comentários com precisão a posição e a postura das garras.
O sensor de pressão é usado para monitorar a força segura das garras em tempo real, para impedir que as mercadorias sejam danificadas por força excessiva ou cair devido à força segura insuficiente; O sensor de posição pode fazer comentários com precisão a posição e a postura das garras.

Diferentes modos de agarrar podem ser comutados de maneira flexível de acordo com a forma, tamanho e peso das mercadorias, como agarramento paralelo, captura de circção e captura lateral.
 As garras duplas podem ajustar automaticamente a força e a posição segura de acordo com a situação real das mercadorias. Ao pegar mercadorias mais leves, as garras reduzirão automaticamente a força segura para evitar danos às mercadorias.
As garras duplas podem ajustar automaticamente a força e a posição segura de acordo com a situação real das mercadorias. Ao pegar mercadorias mais leves, as garras reduzirão automaticamente a força segura para evitar danos às mercadorias.




