





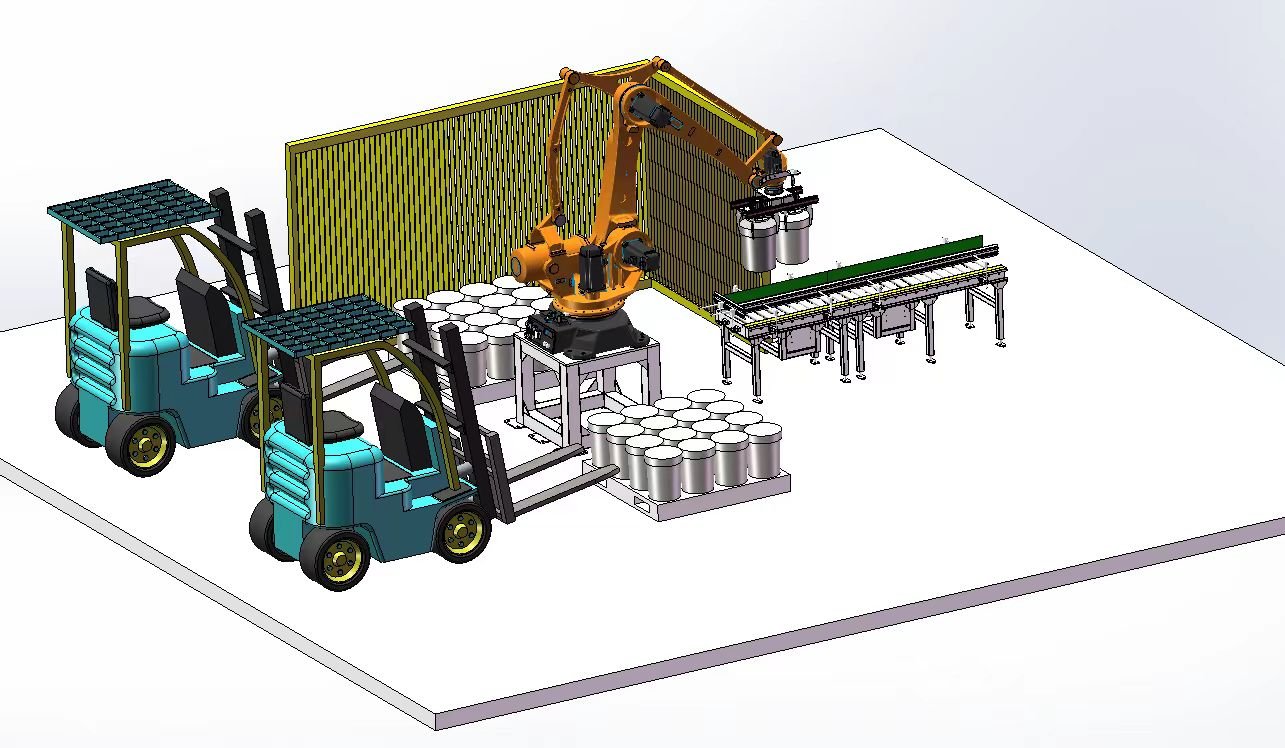



Paletizador conjunto automático
A máquina multiarticulada é semelhante a um braço humano e é caracterizada pela sua capacidade de se mover de forma flexível como uma mão humana. Por exemplo, ao encontrar um obstáculo, o robô multiarticular pode contornar o obstáculo para alcançar o alvo, o que é difícil para o robô industrial do tipo coordenada polar ou cilíndrica geral. Se for necessário concluir alguns movimentos especiais (movimento da manivela), o robô multiarticular também será mais fácil de concluir. Um robô multiarticulado também pode se mover de um ponto a outro em tão pouco tempo quanto uma mão humana. Se um robô multiarticulado estiver equipado com sensores táteis e de força em suas mãos e pulsos, ele poderá realizar trabalhos cada vez mais complexos.
Quando uma junta no braço de um robô multiarticular gira em um ângulo, as outras juntas e suas bielas produzirão um movimento no espaço. Conseqüentemente, a garra atinge uma nova posição e a direção (atitude) da posição também muda. Portanto, o robô multiarticular geral precisa ser controlado por computador. O robô possui detectores de ângulo em cada junta. Dado o ângulo de rotação de cada junta, o problema de obtenção da posição espacial e atitude da garra manual é denominado problema de análise de controle de movimento. Pelo contrário, dada a posição e atitude da garra manual, o problema de quanto ângulo cada biela deve girar é chamado de problema de síntese do movimento. A chave para esses problemas é como usar o computador para realizar as transformações e cálculos acima.








