
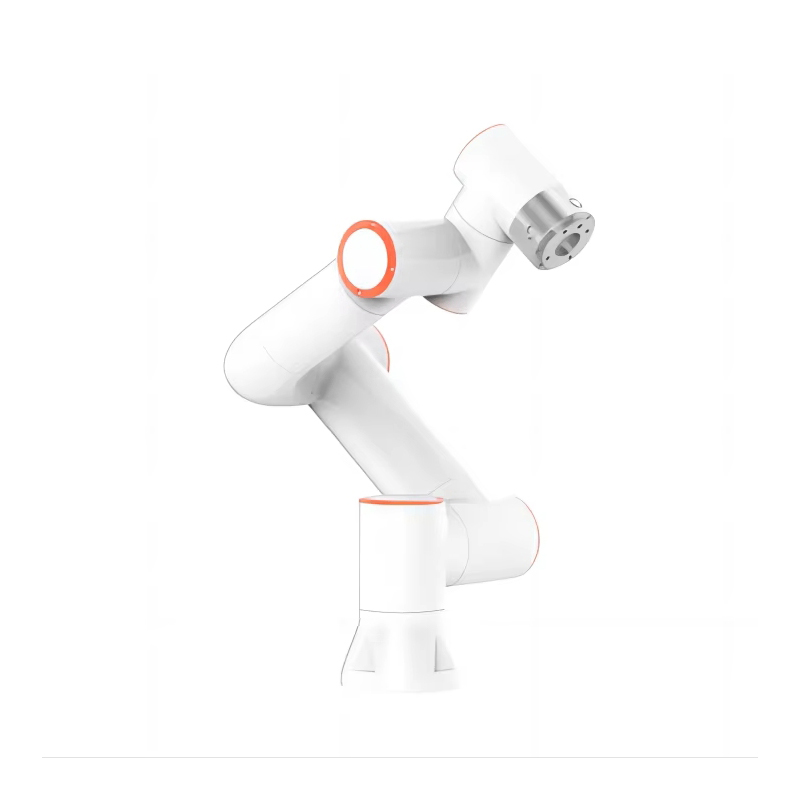




Braço robótico colaborativo com câmera popular
Com sistema de visão avançado e controle de movimento preciso, as tarefas podem ser concluídas com rapidez e precisão, como na montagem de peças, as peças podem ser rapidamente identificadas e instaladas com precisão, reduzindo significativamente o tempo de trabalho. Tomando como exemplo o robô de câmera colaborativa na linha de produção de automóveis, ele pode concluir a montagem de peças do motor com rapidez e precisão e melhorar a eficiência da produção.
Como corpo principal da operação, possui articulações flexíveis e capacidade de movimento, podendo se mover, girar, esticar, etc., livremente em um determinado espaço, e completar com precisão várias tarefas de ação, como agarrar, colocar, montar, etc. Diferentes capacidades de carga e comprimentos de braços de robôs cooperativos podem se adaptar a diferentes tamanhos e tipos de trabalho. Por exemplo, na fabricação de eletrônicos, cobots com pequenas cargas podem ser usados para a montagem de peças finas; Na linha de produção automotiva, grandes cargas de robôs colaborativos podem realizar o manuseio e instalação de peças de carroceria.




Parâmetros do braço do robô cooperativo da câmera
Classificação IP do braço do robô colaborativo da câmera: lP54 (ou lP66)
Carga útil do braço do robô cooperativo da câmera: 5 kg
O alcance do braço robótico colaborativo da câmera: 922 mm
O peso do braço do robô colaborativo da câmera: 23kg
O peso base do braço do robô cooperativo da câmera: 30kg
Uma taxa TCP típica para um braço robótico colaborativo com câmera é de 1 ms
Materiais do braço do robô cooperativo da câmera: alumínio, aço
Velocidade máxima de rotação do braço do robô cooperativo da câmera: ± 180
A faixa de trabalho do braço robótico cooperativo da câmera é ±175 / + 851±160/-265







