
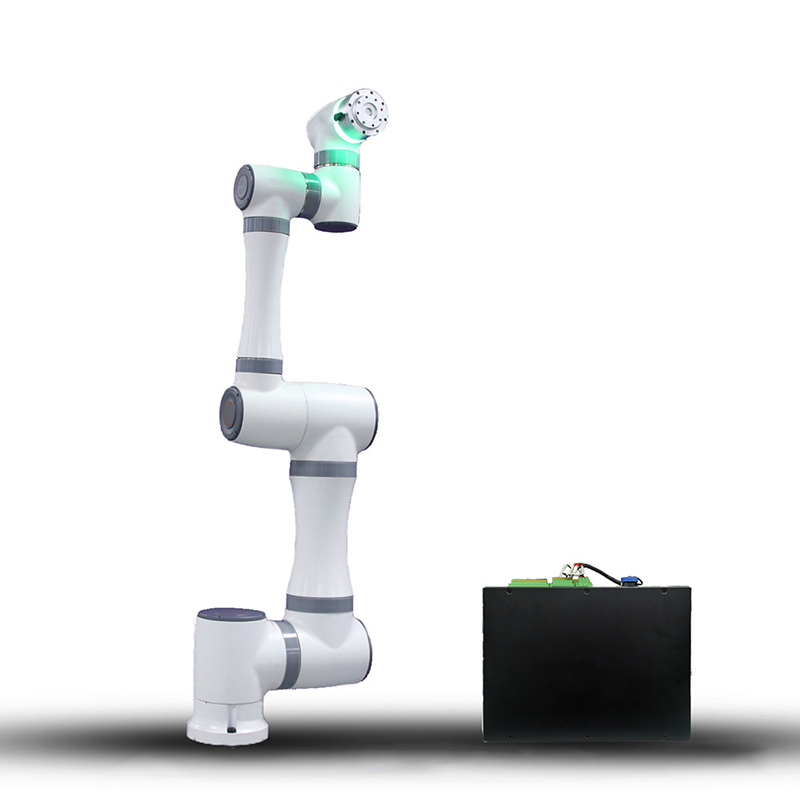



Braço robótico colaborativo inteligente
1. Equipado com sensores de força de alta precisão, pode detectar a força de contato com o corpo humano ou outros objetos em tempo real. .
2. A superfície do braço do robô é lisa, sem arestas vivas e lacunas, e as juntas são arredondadas para reduzir o risco de os operadores serem beliscados ou arranhados durante o contato.
3. Geralmente tem vários graus de liberdade, pode alcançar trajetórias de movimento complexas e diversas no espaço tridimensional e pode alcançar diferentes posições e ângulos com flexibilidade.
4. Utiliza materiais leves e design compacto, é leve e fácil de mover e instalar. Ele pode ser implantado rapidamente em diferentes cenários de trabalho.
5. Suporta modo de programação de ensino. O operador pode arrastar manualmente o braço do robô para a posição e postura alvo, registrar a trajetória do movimento e os parâmetros de ação, e o braço do robô pode reproduzir automaticamente o processo de operação.
O braço robótico colaborativo inteligente é um equipamento industrial inovador que integra tecnologia avançada de inteligência artificial, design mecânico de precisão, detecção multimodal e funções eficientes de interação humano-computador.

Feito de materiais leves e fortes, como liga de alumínio de alta resistência ou fibra de carbono, o braço robótico tem boa rigidez enquanto seu peso é controlado de forma eficaz, alcançando assim uma resposta de movimento rápida e flexível.

É equipado com uma rica variedade de efetores finais rapidamente substituíveis para se adaptar a vários cenários de tarefas complexas. Para agarrar e operar peças minúsculas, é equipado com pinças pneumáticas de alta precisão ou pinças elétricas, e os dedos da pinça são feitos de material especial materiais flexíveis e design adaptativo.

Um sistema de detecção abrangente e avançado é integrado para fornecer suporte fundamental para colaboração inteligente e operação de alta precisão. Os sensores de força são amplamente distribuídos nas articulações e nos efetores finais do braço do robô para monitorar as informações de força e torque do braço do robô durante o movimento e operação em tempo real.

Com um controlador de movimento multieixo de alto desempenho como núcleo, ele executa algoritmos de controle inteligentes otimizados para colaboração inteligente e operação de alta precisão. Ao mesmo tempo, o sistema de controle também suporta uma variedade de protocolos e interfaces de comunicação.

O uso de algoritmos avançados de aprendizagem profunda e tecnologia de visão computacional permite que o robô perceba e compreenda de forma inteligente ambientes de trabalho complexos e objetos operacionais.

Com base em algoritmos de aprendizagem por reforço e modelos de aprendizagem de máquina, o braço robótico pode tomar decisões autônomas e selecionar a estratégia de operação ideal em diferentes cenários de tarefas.

Um algoritmo de controle avançado e compatível foi desenvolvido para permitir que o braço robótico exiba conformidade e flexibilidade semelhantes às de um braço humano ao interagir com o ambiente externo.

Pode ser amplamente utilizado em diferentes elos de produção de vários setores, como fabricação de eletrônicos, fabricação de automóveis, equipamentos, armazenamento logístico, educação e pesquisa científica, e pode se adaptar a vários tipos de tarefas de trabalho e requisitos do ambiente de produção.




