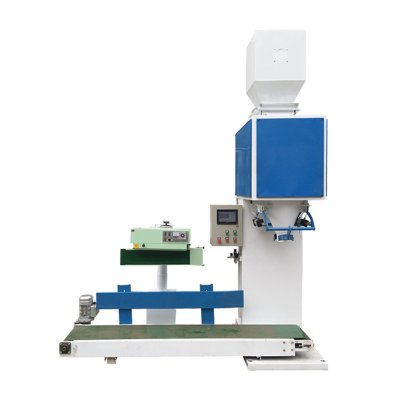


Robô automático de caixa
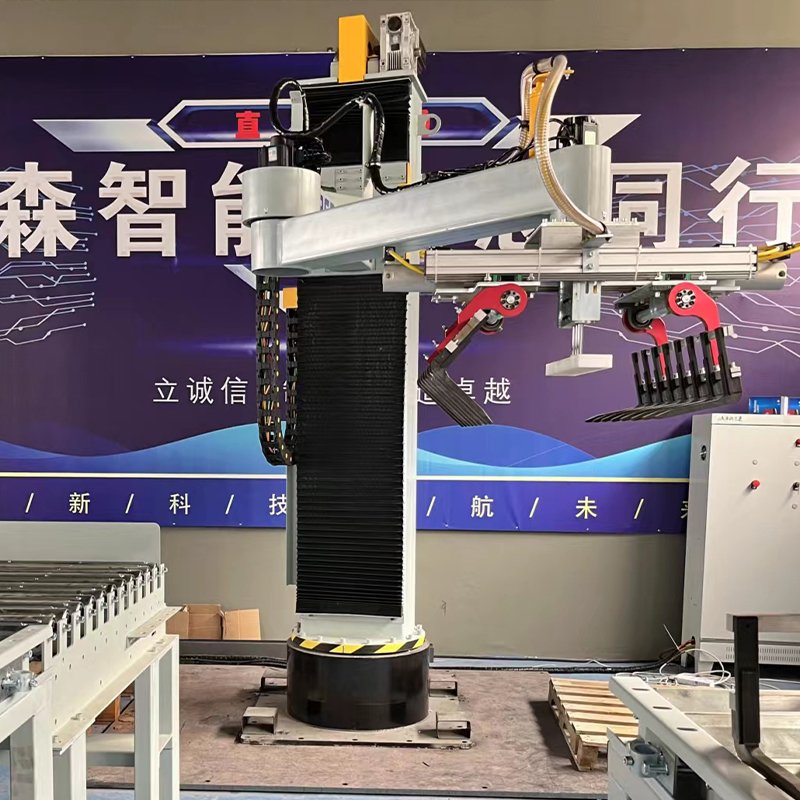
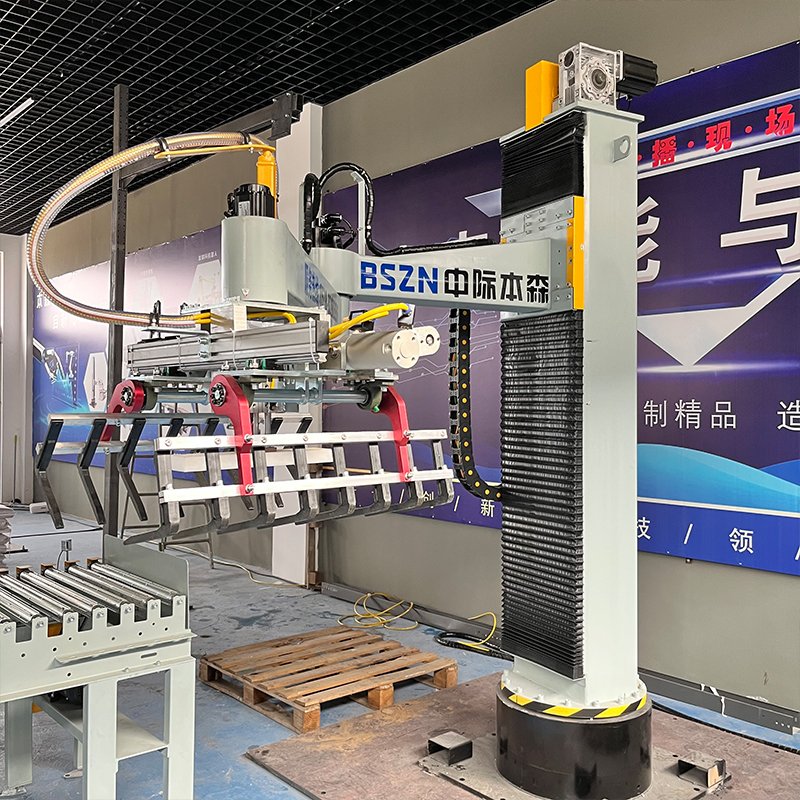
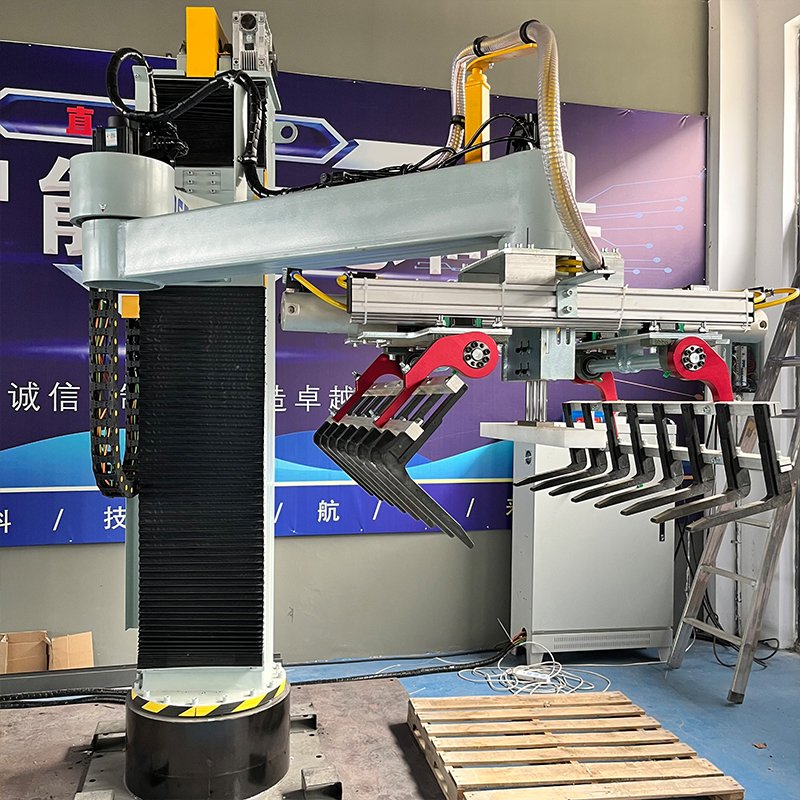
Depois que a máquina de embalagem automática concluir o empacotamento do produto, ela entra na correia transportadora e o produto é transportado para a máquina de vedação de caixas e depois passa por outra correia transportadora. Nesta linha de transporte, há um dispositivo de posicionamento, que também pode ser chamado de defletor de posicionamento, este dispositivo e a placa de posicionamento podem completar a rotação e o posicionamento do material da caixa, que pode fazer com que o material da caixa seja posicionado por um lado e depois transportado para a zona tampão, e o robô de empilhamento está acima da zona do buffer. O robô levanta todo o material do contêiner verticalmente através do manipulador e depois corre horizontalmente para evitar o canal de segurança. Depois de passar pelo canal de segurança, ele é colocado verticalmente na área de paletização. Após a conclusão da colocação, ele retorna de acordo com o caminho original.
O sistema inteligente de embalagem e paletização pode concluir a embalagem do produto, levantamento pesado, manuseio, inversão, encaixe, ângulo de ajuste fino e outro movimento tridimensional de carga espacial, fornecendo ferramentas ideais de manuseio e montagem para montagem da linha de produtos. O manipulador de paletização inteligente de carregamento e descarregamento não apenas reduz a intensidade do trabalho da operação para fornecer manuseio de material seguro, mas também fornece soluções do sistema para ambientes especiais, como oficinas à prova de explosão e lugares perigosos onde o pessoal não pode entrar. Com uma variedade de acessórios fora do padrão, o manipulador pode realizar o levantamento de várias formas da peça de trabalho, para que a carga atinja um estado flutuante de gravidade zero, o operador pode decolar facilmente e pousar a carga, se mover, girar, inclinar-se para a frente e rolar. E a carga é colocada com rapidez e precisão na posição predefinida, usando-a uma pessoa pode operar facilmente o grande número original de itens movidos manualmente.